分类介绍
AD7606是用于监测电压的ADC,16位,采样率200ksps。根据通道数可以分为3类
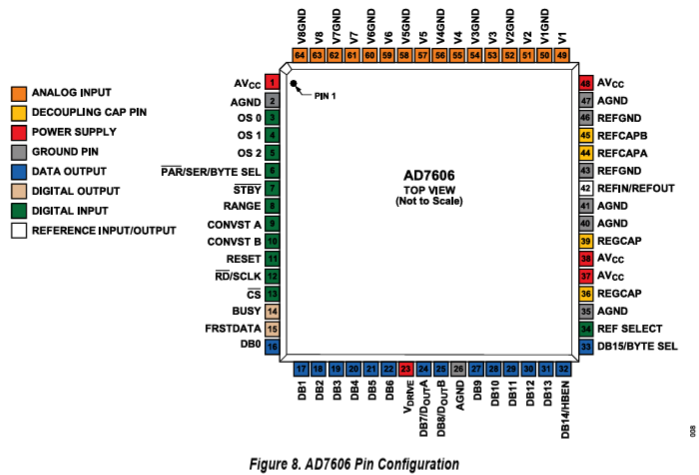
1.AD7606:可以接收8路电压输入
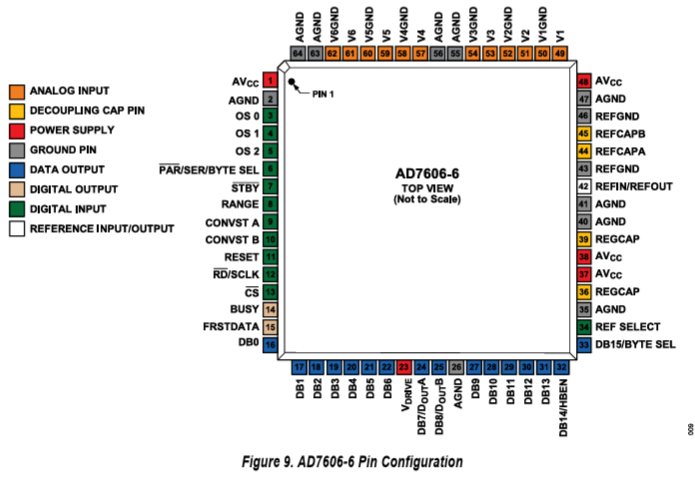
2.AD7606-6:可以接收6路电压输入
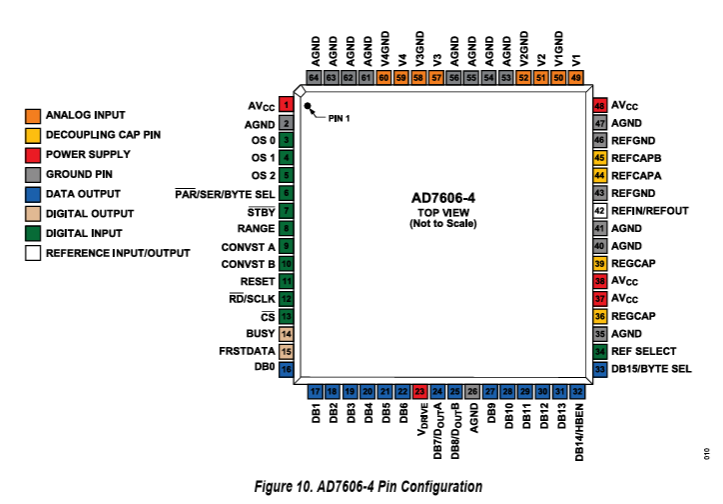
3.AD7606-4:接收4路电压输入
硬件接线
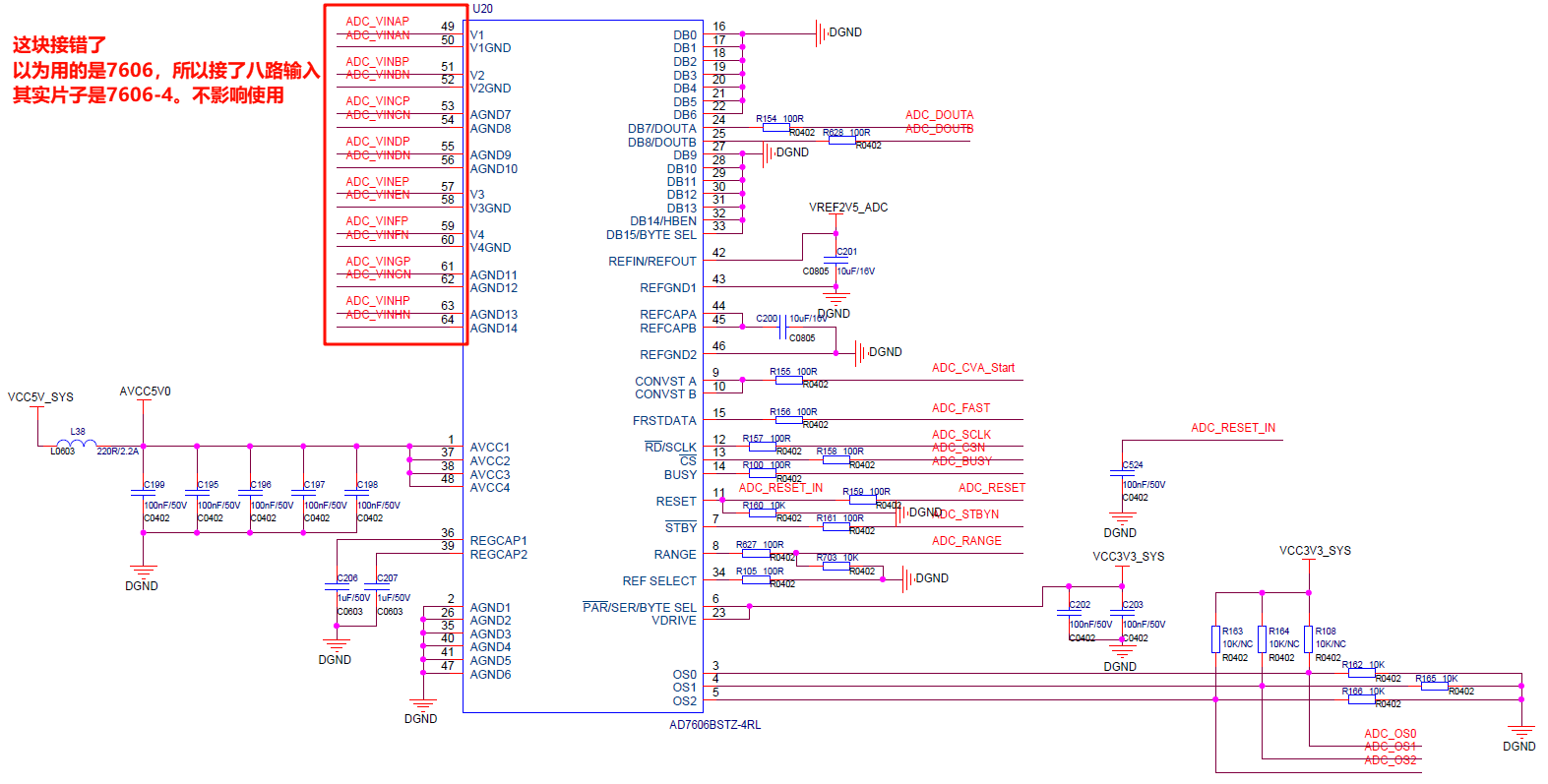
引脚介绍
convstA和convstB
类型:数字输入引脚,
功能:AD7606可以接收多路电压输入,所有的电压输入被分为A和B两组,这两个引脚可以接收来自mcu的电平信号用于控制何时开始对应组的电压转换。
正常状态下向该引脚输入高电平,然后拉低一段时间后重新拉高表示开始转换。只需要保持极短时间的低电平即可,实测168MHz的f429在两次电平切换语句中不必延时。
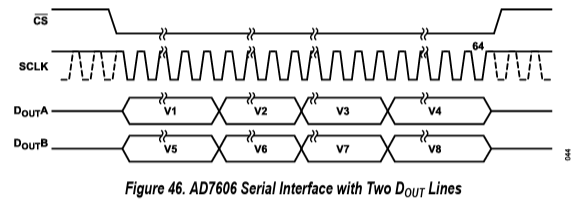
这两个引脚还用于控制数据输出引脚(此处只介绍串行数据输出)[[#DOUTA和 DOUTB]]。
若分别单独拉低covA和covB,中间间隔一段时间,则数据分别从DoutA,DoutB输出。这种情况就需要两个引脚来接受数据。
可以在电路设计时将covA和covB连接在一起,电平同时变化,此时,所有通道的数据会从DoutA引脚输出。这样,就可以使用标准的SPI引脚的MOSI连接DoutA,在后续编程中可以很方便的使用SPI。
PAR/SER/BYTE SEL
类型:数字输入引脚
功能:用于选择数据的串并行输出
一般选串行输出(能用SPI),直接接高电平即可。
BUSY
类型:数字输出引脚
功能:MCU可以接收来自该引脚的数据,高电平表示AD处于busy状态正在进行转换。
可将该引脚接入MCU的一个IO,并设置为外部中断,下降沿触发。当中断发生,表明数据转完成,下一步就可以读数据进行处理了。
AD7606可以在采集时读数,也就是中断设为上升沿触发,按道理说采集时读出的数据应该是无效的,不知道这样设计有什么意义,但我没有实际测试过。
完整的一次通信过程(并行):
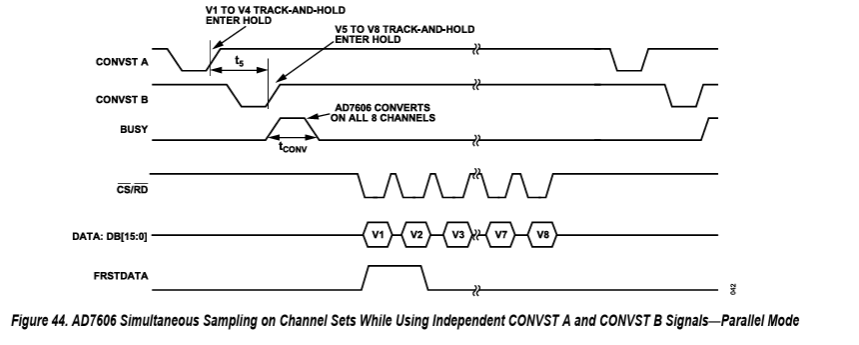
并行和串行只是SPI时序不同,触发SPI之前的时序是一样的。
RANGE
类型:数字输入引脚
功能:模拟输入范围选择。
逻辑输入引脚。该引脚上的极性决定了模拟输入通道的输入范围。
连接到逻辑高电平,则所有通道的模拟输入范围为±10 V。
连接到逻辑低电平,则所有通道的模拟输入范围为±5 V。
该引脚上的逻辑变化会立即影响模拟输入范围。对于快速吞吐率应用,不建议在转换期间更改此引脚。
FRSTDATA
类型:数字输出引脚
FRSTDATA输出信号指示第一个通道V1何时在并行、字节或串行接口上被输出。当CS输入为高电平时,FRSTDATA输出引脚处于三态。CS的下降沿使FRSTDATA脱离三态。
在并行模式下,与V1结果对应的RD下降沿会将FRSTDATA引脚置为高电平,表明V1的结果在输出数据总线上可用。FRSTDATA输出在RD的下一个下降沿后返回逻辑低电平。
在串行模式下,FRSTDATA在CS的下降沿变为高电平,因为这会将V1的最高有效位(MSB)通过DOUTA时钟输出。它在CS下降沿后的第16个SCLK下降沿返回低电平。
DOUTA和 DOUTB
类型:数字输出引脚
功能:串行输出采集的数据
对于AD7606,从通道V1到通道V4的转换结果首先出现在DOUTA上,从通道V5到通道V8的转换结果首先出现在DOUTB上。
对于AD7606-6,从通道V1到通道V3的转换结果首先出现在DOUTA上,从通道V4到通道V6的转换结果首先出现在DOUTB上。
对于AD7606-4,通道V1和通道V2的转换结果首先出现在DOUTA上,通道V3和通道V4的转换结果首先出现在DOUTB上。
CS和SCLK
时钟和片选和SPI同理
配置时:CPHA=1,CPOL=1
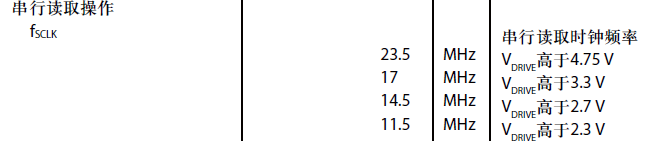
数据手册显示,支持的SPI最高通信速率为23.5MHz,但没必要跑这么快。
cubeMX中配置如下所示,实测可以跑通

器件的SPI通信时序
OS0、OS1和OS2
类型:数字输入引脚
功能:控制AD7606的数字滤波器的过采样率
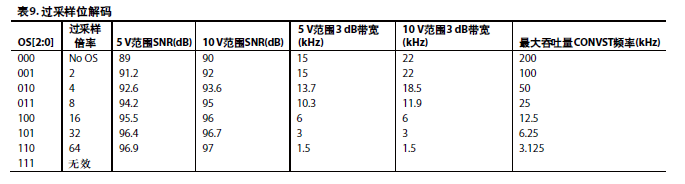
OS引脚在BUSY下降沿锁存,在此之前设置好即可。
软件编程
由于使用硬件SPI接受很简单,只需要在HAL库中点点就好了,如果不会看一下别人的教程,所以重点在如何触发SPI。
基本思路
1.拉低convst引脚,触发转换,7606会自动开始转换,同时拉高busy引脚
2.等待busy下降沿触发外部中断。在中断函数中设置标志量,然后在主函数中轮询。
3.检测到标志量被置位后,拉低CS引脚开启SPI通信,自动获取数据,然后处理。
SPI配置
在cubeMX中点点就好了,注意几个要点
1.时钟相位和极性都是1
2.传输字长是16bit
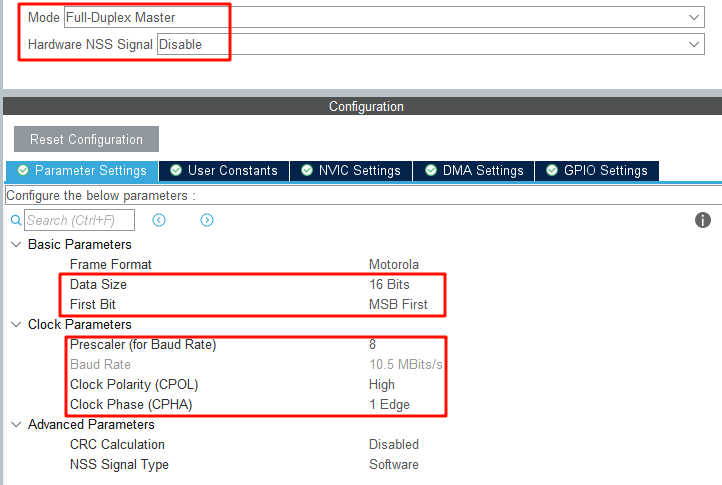
软件代码
1 | /*ad7606.c*/ |
1 | /*main.c*/ |
问题分析
最开始的时候我使用的不是这个逻辑,而是用了SPI4的中断。
1.首先把start_convert函数放在main函数中循环,等待busy引脚触发。
2.然后在外部中断引脚的回调函数中,直接触发转换,拉低CS,使用HAL_SPI_Receive_IT()函数触发接收。这个函数和HAL_SPI_Receive()的区别是:该函数SPI传输是在后台进行的,传输完成后会触发SPI_Rx中断,通知程序传输完成,没有IT的版本是阻塞式传输的。
3.在SPI的传输完成中断回调函数中拉高片选,结束传输,并将一个adc_data_ready_flag置位。
4.main函数中轮询adc_data_ready_flag,被置位时处理数据。
使用这种思路遇到的问题是adc_data_ready_flag不会被置位,无法取到有用的数据。
最开始遇到这种问题,我首先考虑到是否是中断优先级的问题。
在我的项目中涉及中断如下:
1.USART1空闲中断(cmd,Debug接口):0,0
2.SPI4接收中断(AD7606数据接收):1,0
3.EXTI15_10外部中断(AD7606 Busy引脚中断):1,0
我一直以为是串口和SPI的操作逻辑造成了死锁,最终尝试和很多种优先级都会卡在SPI回调,最终还是没有直接解决这个问题,于是我换了一个思路。
考虑到项目中另一个HDC1080的温湿度计,连中断都没开,也可以正常读取。于是我就放弃了SPI中断,转而在Busy引脚中置位标志量。剩下的操作放在main中。也就是现在的[[#基本思路]]。
现在想来,原本的最开始的想法其实很糟糕,有两个大的问题:
1.将一个器件的完整的通信时序拆分在两个中断(回调)函数中完成。这是很错误的操作,中断回调函数的触发完全不受控,而通信时序又对时机有很高的要求。因此,应该将对同一个器件的一次完整通信过程看作具有一定”原子性“的操作,尽量在同一代码块中完成。
2.在中断回调中做了太多操作。虽然在我看来这点操作量不会导致问题,但为了解决问题,我还是把所有操作都放在main中,只在回调中做了置位操作。
最终导致SPI回调卡住的直接原因还是没有找到,但侧面绕过了这个问题,就不必要非要深究那些莫名其妙的bug了。虽然”不要在中断函数中进行复杂操作“这句话都听烂了,但其实没怎么放在心上,果然有些坑只有自己踩过才长记性。